Projects
The Phoenix
Developed the controls software and front-end interface for a large-scale animatronic installation at Wynn Las Vegas. Created a software-in-the-loop digital twin in NVIDIA Isaac Sim with cloth simulation and full-fidelity CAD integration. Co-developed the Omniverse B&R Bridge Extension, enabling the digital twin to be controlled by the same codebase as the physical machine, facilitating testing and validation.
Presented this work on the NVIDIA Livestream.
Knife Grinder Digital Twin
Developed the TwinCAT control system and created a complete digital twin from CAD models in NVIDIA Isaac Sim. The digital twin enables virtual commissioning, testing, and validation of control logic before deployment to the physical system. This was a simulation-only proof of concept.
The Coffee-Bot
Developed a teleoperation system using Vive controllers, Unreal Engine, and an ABB GoFa collaborative robot. Implemented motion recording and playback with EGM (externally guided motion), digital twin integration, and operation logic. The system enables operators to capture complex manual processes through an intuitive interface and replay them on the robot with the ability to refine trajectories.
Formula E Public Robot Demo
Delivered a public-facing interactive robotics demonstration at Formula E's 2023 Portland event within a 2-week timeline. Enabled participants to control an ABB IRB 6700 robot via Vive controllers, allowing them to interactively wave a checkered flag. Responsibilities included software integration, digital twin development, HMI creation, operator training, and on-site deployment.
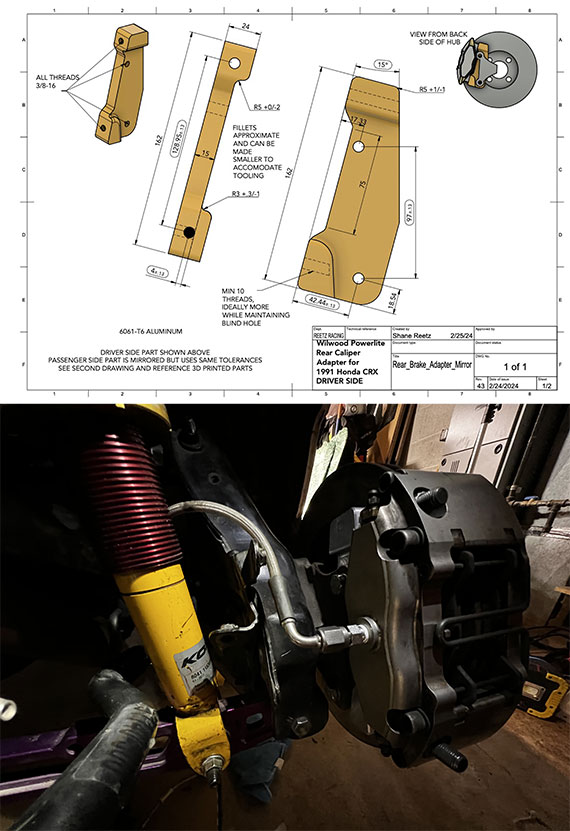
Prints for machinist and part on car
CRX Performance Brake Adapter
Designed and fabricated custom aluminum brake caliper adapters for a racecar application. The adapters enable the use of high-performance calipers, expanding pad selection options and improving braking performance.
Animator: Brian Hansen, LC: John Ashlee, AC: Drew Fortier
Animation Tracker
Developed real-time tracking software for LAIKA's Golden Globe-winning film "Missing Link." The system integrated live data streams from Kuper motion control systems and Dragonframe animation software, providing real-time feedback to animators for one of the most technically demanding sequences.

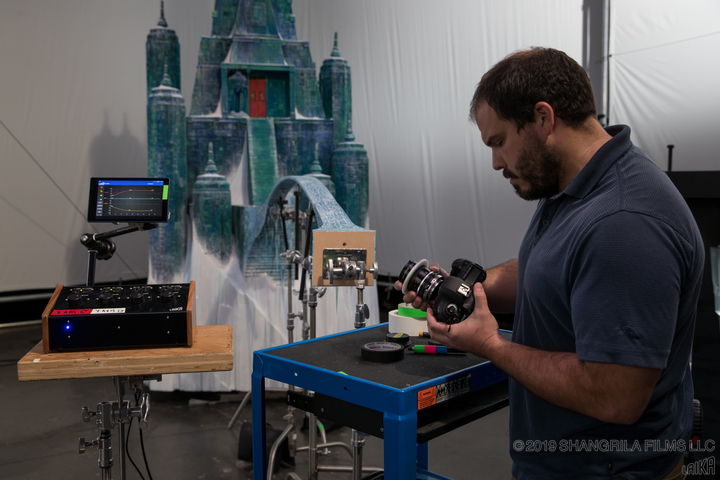
AC Adam Jones setting up a camera. KDI on screen.
KDI
Refactored critical stage infrastructure software at LAIKA that manages motion control and image capture across animation stages. Migrated control logic from embedded hardware to software-based architecture, enabling easier updates and maintenance as the studio scaled from 20, to over 80 stages. Developed comprehensive unit tests, system testing matrices, and documentation for users and developers. Additionally created the accessory hardware and software enabling a single animation station to synchronize capture across multiple camera systems.
LC: Frank Passingham, AC: Gavin Brown

daWinchi
Designed and machined a precision winch system for LAIKA's stop motion feature film "Missing Link." The machine provided positional accuracy sufficient for repeatable motion passes, enabling seamless VFX integration and compositing.
Twiddler, Lens Adapters
Developed a tablet-based animation tracking application for animation data. The system integrates with encoder hardware and a consumer tablet, providing real-time tracking data for stop-motion animation sequences. Pictured in this photo is also a specialty backfocus lens adapter I designed for Canon EOS cameras.
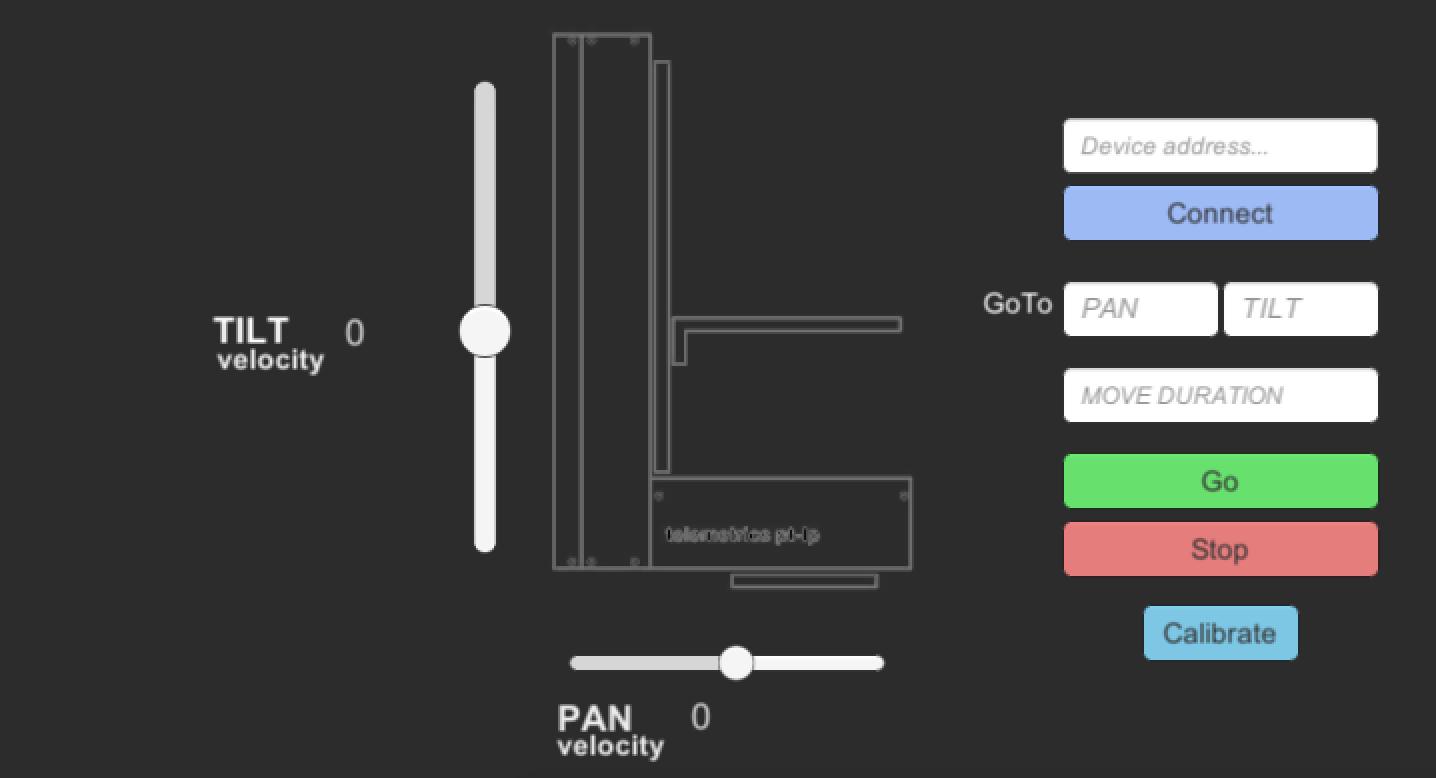
Telemetrics Control
Developed a Unity-based control interface for a servo-driven pan-tilt head system. The interface communicates via serial port, providing precise control over camera positioning for motion control applications.
Quilt Generator
Developed a generative design iPhone application using Unity that enables users to create 'flying geese' style quilt patterns. The app samples colors in real-time from the device camera, allowing users to generate custom quilt designs based on their environment.